
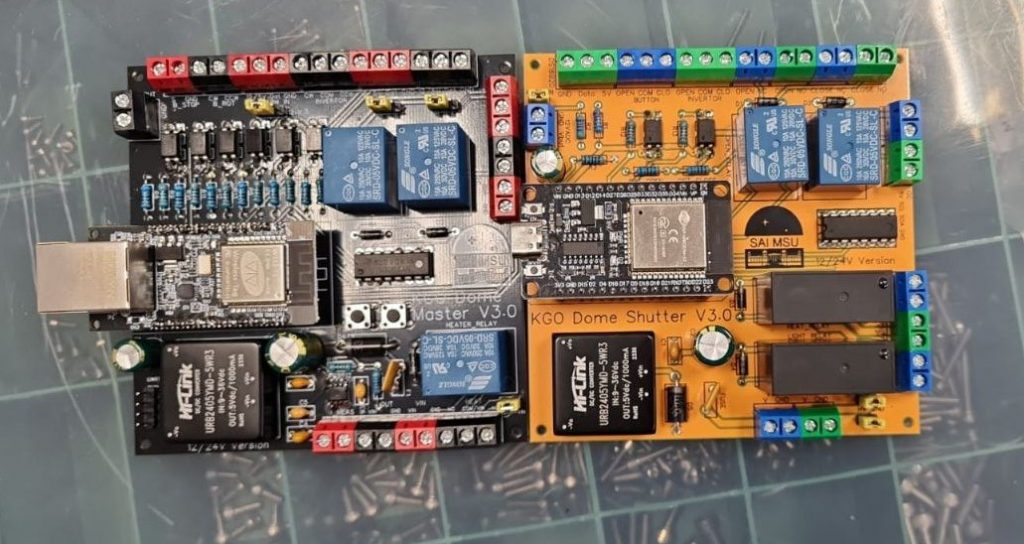
Контроллер состоит из 2 плат, общающихся между собой по радиоканалу (BT serial). Платы работают под управлением микроконтроллеров ESP32. «Нижняя» (неподвижная) плата считывает с датчика текущее значение азимута купола, управляет «верхней» (подвижной) платой и частотным преобразователем мотора вращения купола. Она подключается к сети управления телескопом по ethernet. На микроконтроллере платы работает веб-сервер, используемый для управления куполом как с помощью простого API, так и через интерфейс ASCOM ALPACA. Также поддерживается вариант ручного управления через кнопки на веб-странице сервера. Так же на нижней плате стоит реле управление нагрузкой, например нагревателем редуктора мотора, и возможно подключения датчика температуры.
«Верхняя» плата расположена на вращающейся части и управляет открытием и закрытием створок. К ней возможно подключить датчик влажности и температуры, и отдельный датчик температуры. Существует два канала управления, например светом и нагревателем редуктора мотора. Кроме того, контроллер измеряет и отображает напряжение на клеммах питания, например батареи системы управления створками.
В качестве датчика угла поворота купола можно использовать ленту из штрих-кодов, либо энкодер на базе индуктивного датчика.
Сейчас на базе этих контроллеров работает 2 купола в КГО и 3 купола в КАС. А так же несколько куполов у сторонних организаций. По вопросам приобретения можно обращаться в лабораторию КГО ГАИШ МГУ.